Self-Attention 和 Transformer 自从问世就成为了自然语言处理领域的新星. 得益于全局的注意力机制和并行化的训练, 基于 Transformer 的自然语言模型能够方便的编码的长距离依赖关系, 同时在大规模自然语言数据集上并行训练成为可能.
1. 基本概念
Self-Attention 和 Transformer1 自从问世就成为了自然语言处理 (Natural Language Processing, NLP) 领域的新星. 得益于全局的注意力机制和并行化的训练, 基于 Transformer 的自然语言模型能够方便的编码的长距离依赖关系, 同时在大规模自然语言数据集上并行训练成为可能.
1.1 Self-Attention
Self-Attention 在空间维度做全局吸收. 假设输入特征 \(F\in\mathbb{R}^{b\times l\times d_0}\), 其中 \(b\) 是批大小 (batch size), \(l\) 是空间维度 (NLP 中是序列长度, CV 中是图像长宽的乘积 \(h\times w\)), \(d_0\) 是特征维度.
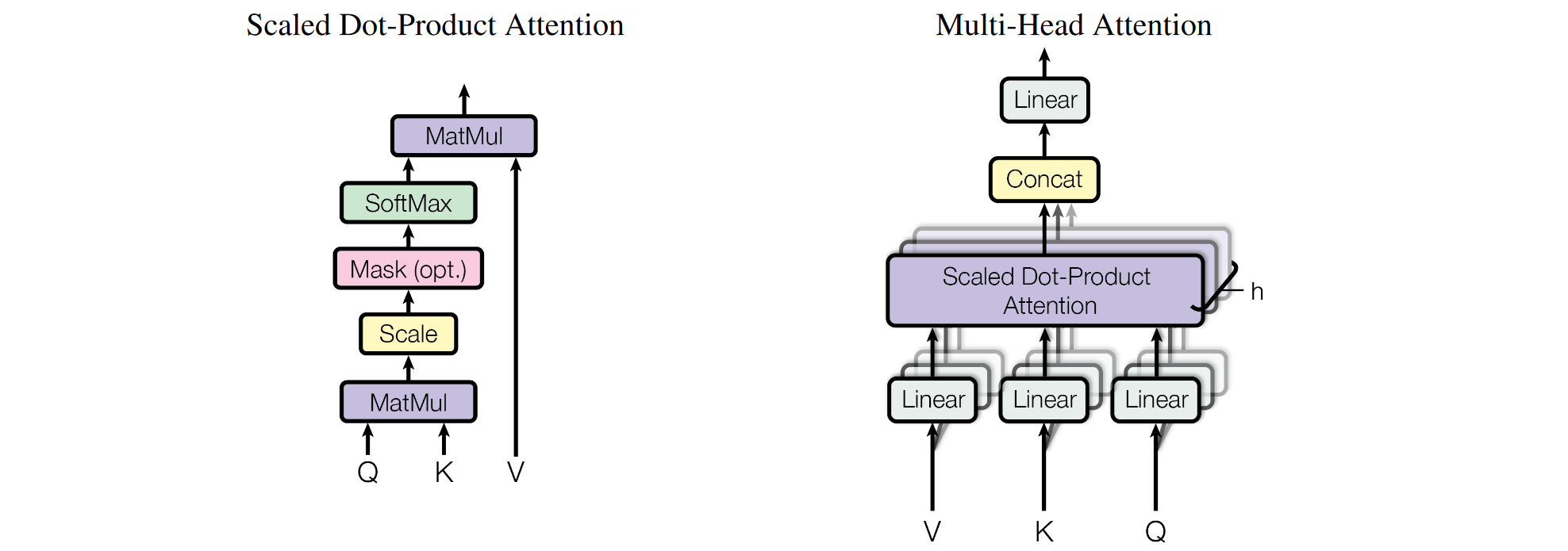
- 首先对 \(F\) 做线性变化得到 \(Q=FW_Q, K=FW_K, V=FW_V \in\mathbb{R}^{b\times l\times d}\)
- 计算 \(Q, K\) 的相似度矩阵 \(S = QK^T \in\mathbb{R}^{b\times l\times l}\)
- 缩放相似度矩阵 \(S / \sqrt{d}\)
- Softmax 沿 \(K\) 的轴归一化得到权重 \(W=\text{Softmax}(S / \sqrt{d})\)
- 对 \(V\) 加权求和得到新的特征
上面的过程称为 “Scaled Dot-Product Attention”. 如果把 \(Q, K, V\) 的通道划分为 \(n\) 份, 对每一份单独做 Self-Attention, 那么称为 Multi-Head Self-Attention (MSA).
注解:
- Self-Attention 的 \(Q, K, V\) 来自同一个输入特征 \(F\). 由于矩阵化计算, 输入序列(图像)的空间点是并行处理的, 因此模型无法捕获序列的顺序信息和图像的空间位置信息. 所以需要对 \(Q, K, V\) 不同的空间点加上不同的位置编码 (positional encoding). 为了清晰, 上面的公式略去了位置编码.
- Cross-Attention 的 \(Q\) 来自输入特征 \(F_1\), 而 \(K, V\) 来自输入特征 \(F_2\)
- 缩放. 当 \(C_1\) 较大时, 相似度矩阵在 Softmax 后梯度会偏小, 导致学习困难. 见图, Softmax 的梯度在 \(x\) 绝对值增大时梯度迅速衰减.
- 加权. 根据当前点与其他点的相似度, 使用 \(V\) 重构当前点的信息.
- 加入残差后 \(F_{out} = F_{in} + \text{Attention}(F_{in})\), 那么注意力学习的就是输出和输出的变化:
- \(\text{Self-Attention}(F_{in}) = F_{out} - F_{in}\), 这可以看作输入特征吸收了自己其他位置的信息
- \(\text{Cross-Attention}(F_{in}^{(q)}, F_{in}^{(k)}) = F_{out}^{(q)} - F_{in}^{(q)}\), 这可以看作输入特征 \(F_{in_q}\) 吸收了 \(F_{in_k}\) 的信息.
1.2 Transformer
现代卷积网络使用卷积作为基础模块, 多层卷积同时包含了空间维度和通道维度的信息交互.
而上面的 Attention 是空间维度上的信息交互, 因此为了更强的表达能力, 后面接一个前馈网络 (Feed Forward Network, FFN) 作用于每个(空间)点上, 实现通道维度的信息交互.
把上面的 Attention 和 FFN 作为一个完整的模块, 叠加多次, 就形成了一个编码器 (Encoder).
根据 NLP 任务的特点, 对输入语句利用编码器编码为一组固定的特征. 然后利用 Attention + FFN 的组合叠加多层构造解码器. 解码器不能并行输出整个输出序列, 因为输出序列中后面的词应当依赖前面的词产生. 给定输出序列的第一个提示词, 使用 Self-Attention 对自己进行编码, 再使用 Cross-Attention 吸收编码器给出的输入特征预测下一个词.
2. Vision-Transformer (ViT)
2.1 模型
ViT2 创造性地把图像分类问题看成序列分类问题.
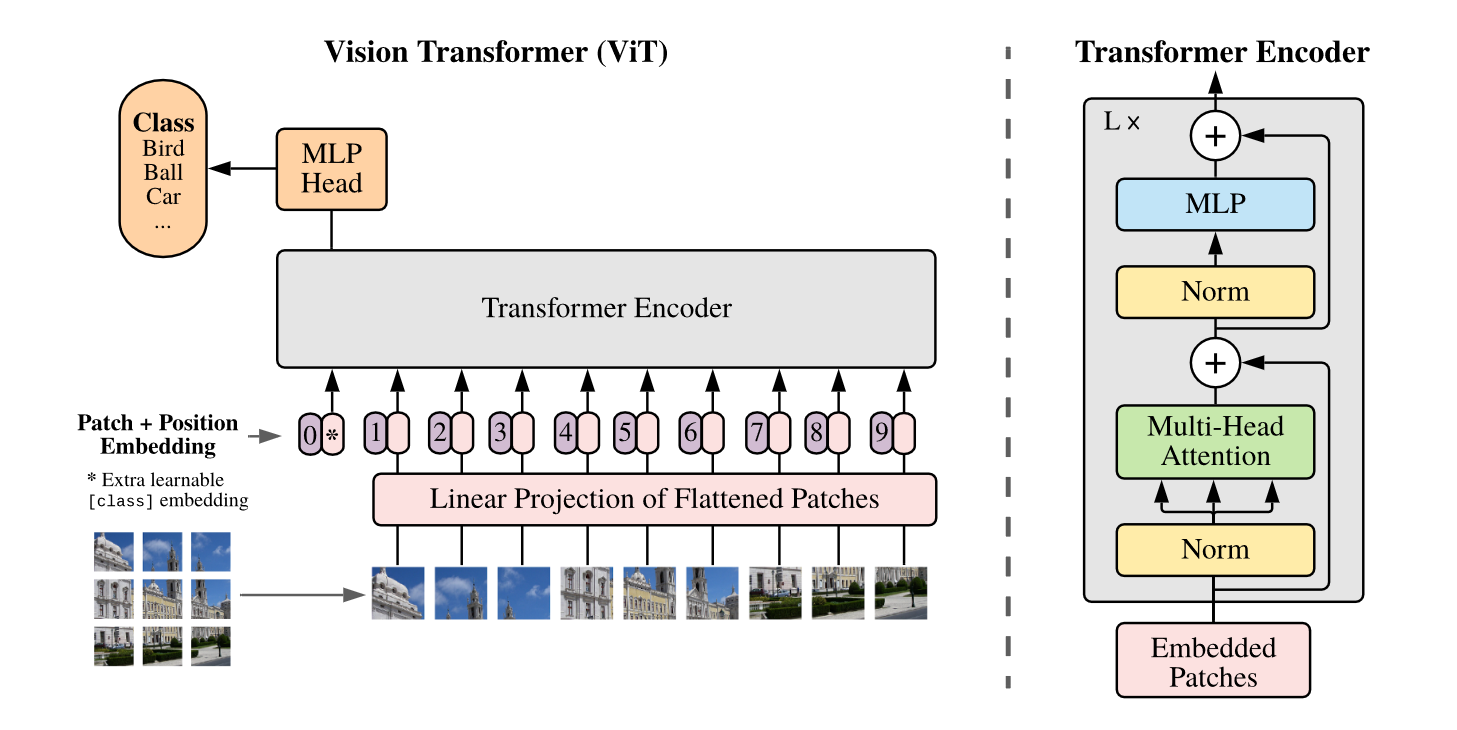
首先把输入图像分成大小为 \(P\times P\) 的块 (比如 \(P = 16\)), 那么一个 \(C\times H\times W\) 的输入图像就可以划分成 \(N = HW / P^2\) 个大小为 \(C\times P\times P\) 的图像块 \(\mathbf{x}_p\in\mathbb{R}^{N\times (P^2\cdot C)}\).
然后使用一个线性变换 \(\mathbf{E}\in\mathbb{R}^{(P^2\cdot C)\times D}\) 把每个图像块映射为一个 \(D\) 维的特征向量. 在输入序列开头增加一个 [CLASS] 的可学习的 token, 用于后续预测类别输出. 此外还需要加上位置编码以引入空间信息.
然后这个长度为 \(N + 1\) 的序列输入 Transformer 的编码器. 编码器由 MSA 和 FFN 交替组合构成, 每个 MSA 和 FFN 前都加入 Layer Norm, 后面都是用残差连接.
ViT 不需要解码器.
输出层只需要把开头的 [CLASS] token 取出来, 经过一个线性层后作为分类输出.
ViT 可以用公式表示为:
\[\begin{align} \mathbf{z}_0 &= [\mathbf{x}_{\text{class}}; \mathbf{x}_p^1\mathbf{E}; \mathbf{x}_p^2\mathbf{E}; \cdots; \mathbf{x}_p^N\mathbf{E};] + \mathbf{E}_{\text{pos}}, & \mathbf{E}&\in\mathbb{R}^{(P^2\cdot C)\times D}, \mathbf{E}_{\text{pos}}\in\mathbb{R}^{(N + 1)\times D}, \\ \mathbf{z}'_l &= \text{MSA}(\text{LN}(\mathbf{z}_{l-1})) + \mathbf{z}_{l-1}, & l &=1\dots L, \\ \mathbf{z}_l &= \text{FFN}(\text{LN}(\mathbf{z}'_l)) + \mathbf{z}'_l, & l &=1\dots L, \\ \mathbf{y} &= \text{LN}(\mathbf{z}_L^0) \end{align}\]2.2 数据集
| 数据集 | 类别数量 | 图像数量 | 分辨率 |
|---|---|---|---|
| ImageNet | 1k | 1.3M | avg 469 x 387 |
| ImageNet | 21k | 14M | avg 469 x 387 |
| ImageNet Real | 21k | 14M | avg 469 x 387 |
| JFT | 18k | 303M | - |
- ImageNet Real3 是对 ImageNet 的标签进行修正后的数据集
2.3 结构和参数
| 模型 | 层数 | 输入序列维度 \(D\) | MLP 隐藏层维度 | Head 数 | 参数量 |
|---|---|---|---|---|---|
| ViT-Small | 12 | 384 | 1536 | 12 | 22M |
| ViT-Base | 12 | 768 | 3072 | 12 | 86M |
| ViT-Large | 24 | 1024 | 4096 | 16 | 307M |
| ViT-Huge | 32 | 1280 | 5120 | 16 | 632M |
参数量计算
ViT 的参数依次包含在以下层:
| 网络层 | 参数量 |
|---|---|
| Input Embedding Layer (input dim \(P^2\cdot C\), embedding dim \(D\)) | \(P^2CD + D\) |
| Class Token | \(D\) |
| Positional Embedding (number patches \(N\)) | \((N + 1)D\) |
| Attention (layers \(L\), heads \(H\)) | \(L(4D^2 + 4D)\) |
| MLP (MLP hidden dim \(D'=4D\)) | \(L(2DD' + D' + D)\) |
| Layer Norm | \(L\cdot4D + 2D\) |
| Head | ? |
总的参数量为
\[\text{#Transformer} = (P^2C + N + 5)D + L(12D^2 + 13D)\]2.4 结果
备注:
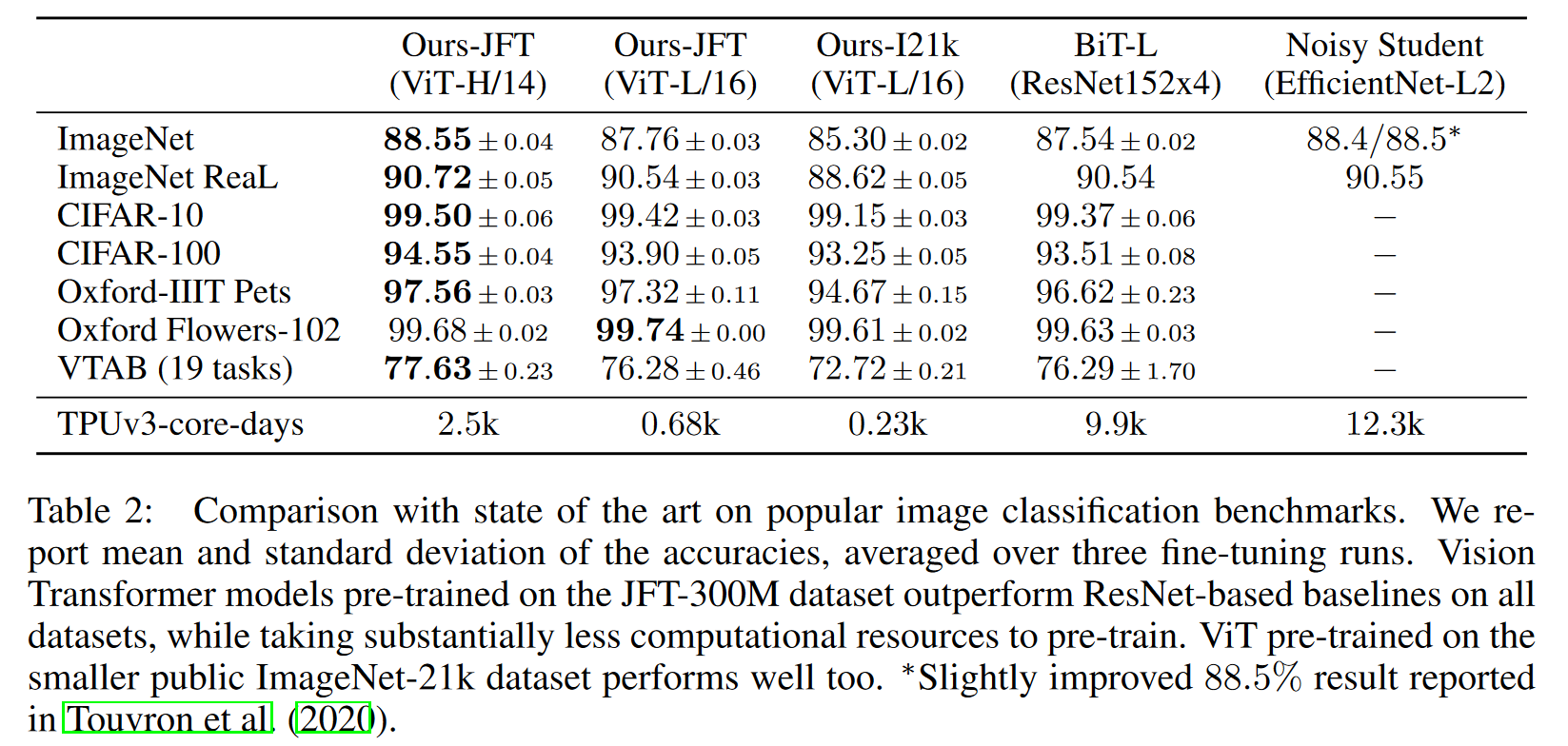
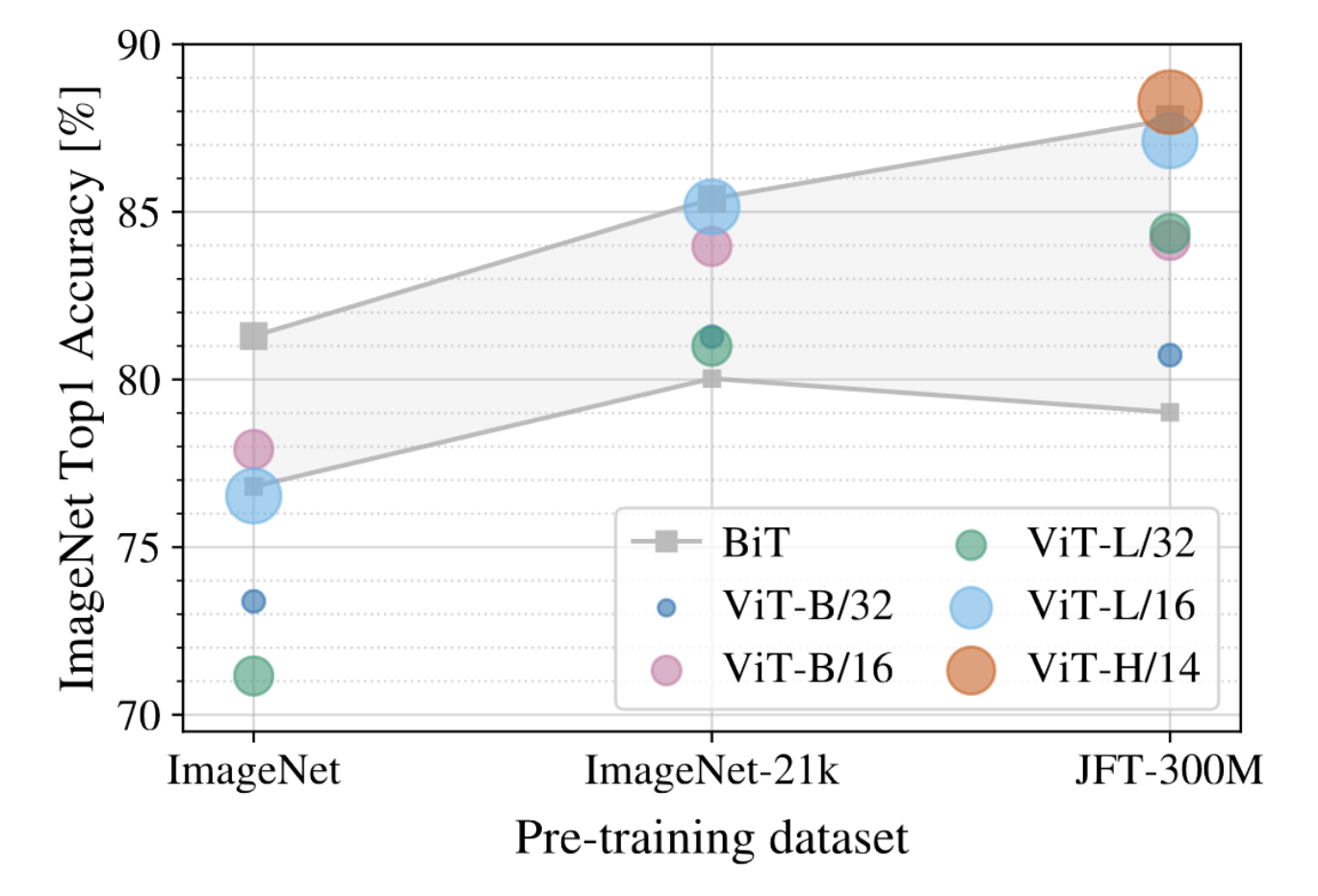
- 输入的图像序列也可以替换为卷积网络的特征图. 小模型使用特征图更好一些, 大模型两种输入序列的差距基本消失.
- ViT 可以达到和卷积网络相似的性能, 同时训练速度更快.
- ViT 在更大规模的数据集上 (JFT) 上的表现最好, 在稍小规模的数据集上 (ImageNet) 表现不如卷积网络.
3. Data-efficient image Transformer (DeiT)
3.1 模型
ViT 需要使用大量的数据 (如 JFT) 先预训练, 然后在 ImageNet 上微调才能达到和卷积网络相同的性能.
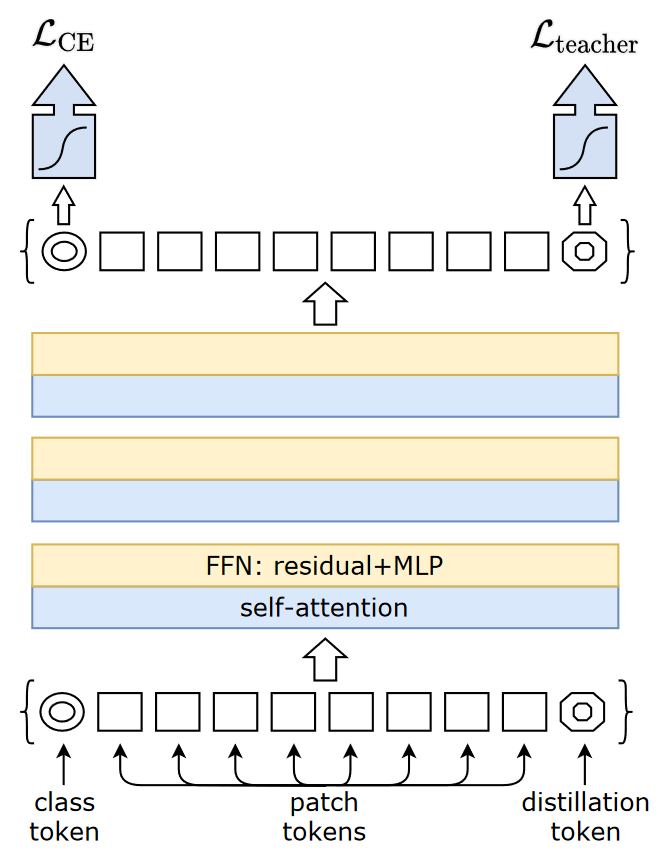
DeiT 引入蒸馏来解决该问题. 如上图, DeiT 额外增加一个 distillation token, 并用该 token 对应的输出计算蒸馏损失. 还提出了 Hard Distillation 的方法. 即使用 teacher 的预测结果作为标签, 直接使用交叉熵训练 (不使用 KL divergence):
\[\mathcal{L}^{\text{hardDistill}} = \frac12\mathcal{L}_{\text{CE}}(\phi(Z_s), y) + \frac12\mathcal{L}_{\text{CE}}(\phi(Z_s), y_t).\]3.2 结构
| 模型 | 层数 | 输入序列维度 \(D\) | Head 数 | 参数量 |
|---|---|---|---|---|
| DeiT-Tiny | 12 | 192 | 3 | 5M |
| DeiT-Small | 12 | 384 | 6 | 22M |
| DeiT-Base | 12 | 768 | 12 | 86M |
3.3 结果
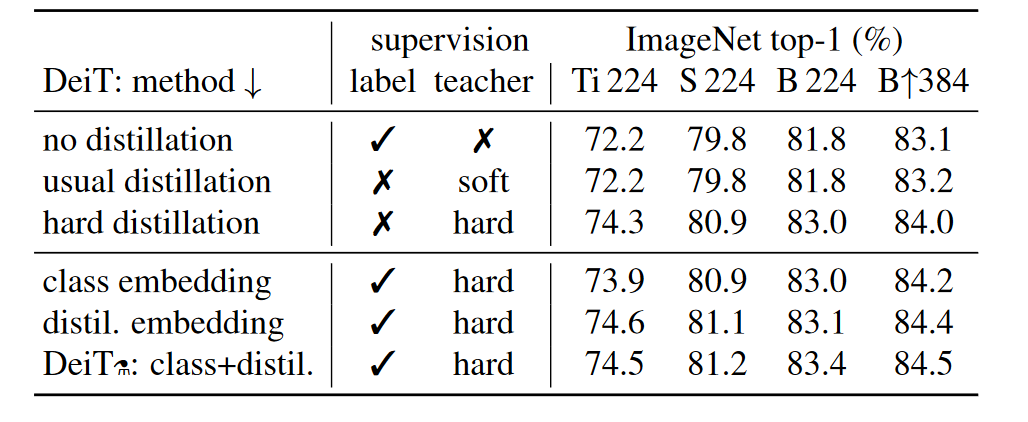
DeiT 的主要结果如下
备注:
- 下三行是使用了额外的 distillation token 的结果. 使用该 token 的效果更好.
- 使用末尾 distillation embedding 做分类器的效果要好于开头 class embedding 做分类器.
- DeiT 分析了不同蒸馏标签的影响, 发现用 hard label 更好.
- 使用 Convnet teacher 要好于使用 Transformer teacher. (见论文表2)
References
-
Attention is all you need
Ashish Vaswani, Noam Shazeer, Niki Parmar, Jakob Uszkoreit, Llion Jones, Aidan N. Gomez, Lukasz Kaiser, Illia Polosukhin
[html] in NeruIPS 2017. ↩ -
An Image is Worth 16x16 Words: Transformers for Image Recognition at Scale
Alexey Dosovitskiy, Lucas Beyer, Alexander Kolesnikov, et al.
[html] in ICLR 2021. ↩ -
Are we done with ImageNet?
Lucas Beyer, Olivier J. Hénaff, Alexander Kolesnikov, Xiaohua Zhai, Aäron van den Oord
[html] in arXiv 2006. ↩