- 1. Introduction
- 2. Graph Cuts and Computer Vision
- 3. Segmentation Technique
- 4. Examples
- 5. Appendix*
- 6. References
Title: Interactive Graph Cuts for Optimal Boundary & Region Segmentation of Object in N-D Images
Author: Yuri Y. Boykov, Marie-Pierre Jolly
本文是基于 Graph-Cuts 进行自然图像/医学图像分割的一篇奠基之作, 许多常用的图割方法(如 GrabCut)是基于本文而设计的. 本文的两名作者均来自于西门子公司研究中心.
1. Introduction
图割法是计算机视觉领域分割任务常用的方法. 本文提出了交互式图割法, 同时结合软约束(soft constraint)和硬约束(hard constraint)明确地定义损失函数, 并得到全局最优解.
考虑任意一个点的集合 \(\mathcal{P}\) 和点对的集合
\[\mathcal{N}:=\{(p,q)\lvert (p,q)=(q,p),\; p, q\in\mathcal{P}\}.\]令 \(A=(A_1, \cdots, A_p, \cdots, A_{\lvert\mathcal{P}\rvert})\) 表示二值向量, 元素 \(A_p\) 代表集合 \(\mathcal{P}\) 中像素 \(p\) 的一种赋值(0或1, 前景或背景), 从而 \(A\) 即表示一种分割. 那么我们加在分割 \(A\) 的边界和区域上的软约束可以表示为损失函数 \(E(A)\) :
\[E(A) := \lambda R(A) + B(A),\]其中
\[\begin{align} R(A) &:= \sum_{p\in\mathcal{P}}R_p(A_p) \\ B(A) &:= \sum_{(p,q)\in\mathcal{N}}B_{(p,q)}\cdot\delta(A_p\cdot A_q), \end{align}\]且
\[\delta(A_p, A_q)= \begin{cases} 1 & \text{if } A_p\neq A_q \\ 0 & \text{otherwise}. \end{cases}\]区域项 \(R(A)\) 表示给像素 \(p\) 赋以”前景”或”背景”的惩罚, 边界项 \(B(A)\) 中 \(B_{(p, q)}\geq0\) 表示对像素 \(p\) 和 \(q\) 取值不连续性的惩罚, 取值越接近则 \(B_{(p, q)}\) 越大, 反之越小.
2. Graph Cuts and Computer Vision
无向图 \(\mathcal{G}=<\mathcal{V, E}>\) 定义为一族顶点 \(\mathcal{V}\) 和连接这些点的边 \(\mathcal{E}\) . 每条边 \(e\in\mathcal{E}\) 都被赋予非负的权重(损失) \(w_e\) . 我们引入两个特殊的顶点称为端点(terminals), 他们和图中所有其他点相连, 但彼此不直接相连. 一个割(cut)是边集的一个子集 \(C\in\mathcal{E}\) 使得图中的两个端点被分离开 \(\mathcal{G}(C):=<\mathcal{V, E}\backslash C>\) . 在组合优化中我们一般把割的损失定义为边上损失的和
\[\lvert C\rvert := \sum_{c\in C}w_e.\]图割法求解优化目标(最小割)的方法是使用最大流最小割定理, 即求解最小割等价于求解最大流. 另外, 有两个端点的图的最小割有更高效的(低阶)多项式时间算法求解.
3. Segmentation Technique
假设 \(\mathcal{O}\) 和 \(\mathcal{B}\) 表示已经被用户标记为”(目标)object”和”(背景)background”像素的集合, 那么有 \(\mathcal{O}\in\mathcal{P}\) 和 \(\mathcal{B}\in\mathcal{P}\) 并且 \(\mathcal{O}\cap\mathcal{B}=\emptyset\) . 我们的目标是计算公式(2)满足硬约束
\[\begin{align} \forall p\in\mathcal{O},\qquad & A_p = \text{"obj"} \\ \forall p\in\mathcal{B},\qquad & A_p = \text{"backround"}. \end{align}\]的全局最优解. 从图像构建图如下图所示.
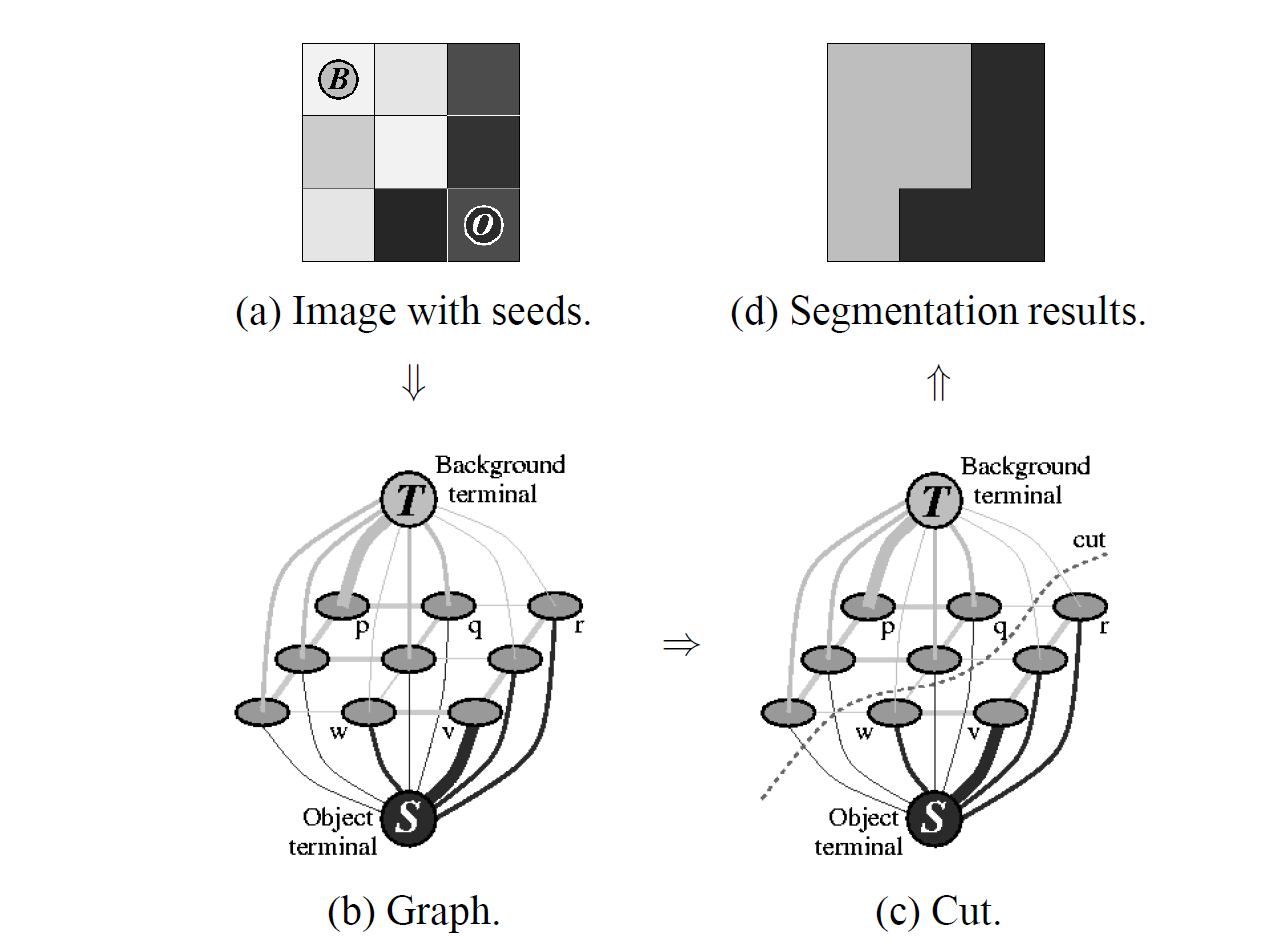
A simple 2D segmentation example for a 3x3 image.
3.1 Details
图 \(\mathcal{G}=<\mathcal{V, E}>\) , 其中顶点包括图像中的像素点和两个端点(源点 \(S\) 和汇点 \(T\)), 所以有
\[\mathcal{V} = \mathcal{P}\cup\{S, T\}.\]边集包括两种类型的边: (1) n-links (neighborhood links) 和 t-links (terminal links). 每个像素点 \(p\) 都关联了边 \((p, S)\) 和 \((p, T)\) . 集合 \(\mathcal{N}\) 中的邻居像素 \((p, q)\) 都关联了一条 n-link. 所以有
\[\mathcal{E} = \mathcal{N}\bigcup_{p\in\mathcal{P}}\{(p, S), (p, T)\}.\]为了清晰, 我们把不同类型边的权重列在下面的表格中
| edge | weight(cost) | for |
| $$ (p, q) $$ | $$ B_{(p, q)} $$ | $$ (p, q)\in\mathcal{N} $$ |
| $$ \{p, S\} $$ | $$ \lambda\cdot R_p(\text{"bkg"}) $$ | $$ p\in\mathcal{P},\;p\notin\mathcal{O}\cup\mathcal{B} $$ |
| $$ K $$ | $$ p\in\mathcal{O} $$ | |
| $$ 0 $$ | $$ p\in\mathcal{B} $$ | |
| $$ \{p, T\} $$ | $$ \lambda\cdot R_p(\text{"obj"}) $$ | $$ p\in\mathcal{P}, \;p\notin\mathcal{O}\cup\mathcal{B} $$ |
| $$ 0 $$ | $$ p\in\mathcal{O} $$ | |
| $$ K $$ | $$ p\in\mathcal{B} $$ |
其中
\[K = 1 + \max_{p\in\mathcal{P}}\sum_{q:(p, q)\in\mathcal{N}}B_{(p, q)}.\]3.2 Min-Cut
我们想要的最小割 \(C\) 应该满足以下条件:
- 在每个像素点 \(p\) 上只有一条 t-link 属于 \(C\)
- \((p, q)\in C\) 当且仅当 \(p, q\) 连接到不同的端点
- 如果 \(p\in\mathcal{O}\) , 则 \((p, T)\in C\)
- 如果 \(p\in\mathcal{B}\) , 则 \((p, S)\in C\)
4. Examples
从用户标记的像素中提取直方图作为密度分布的先验 \(Pr(I\lvert\mathcal{O})\) 和 \(Pr(I\lvert\mathcal{B})\) . 那么区域惩罚可以写为
\[\begin{align} R_p(\text{"obj"})&=-\ln Pr(I_p\lvert\mathcal{O}) \\ R_p(\text{"bkg"})&=-\ln Pr(I_p\lvert\mathcal{B}). \end{align}\]而边界惩罚使用 ad-hoc 函数
\[B_{\{p, q\}}\propto\exp\left(-\frac{(I_p-I_q)^2}{2\sigma^2}\right)\cdot\frac1{dist(p, q)}.\]注意: 在 2D 图像中使用 8-neighborhood, 在 3D 图像中使用 26-neighborhood.
5. Appendix*
网络流问题: 给定一个网络图和两个端点(源点s和汇点t), 每条边有一定的容量, 计算从s到t的最大流量.
A. Maxflow Basic Algorithm
基础算法 - Ford Fulkerson 算法:
- Inputs Given a Network \(G=(V,E)\) with flow capacity \(c\), a source node \(s\), and a sink node \(t\) .
- Output Compute a flow f from \(s\) to \(t\) of maximum value
- Residual graph \(G_f(u, v)\leftarrow G(u, v)\) for all edges \((u, v)\) . \(maxflow\leftarrow 0\) .
- while there is a path \(p\) from \(s\) to \(t\) in \(G_f\) , such that \(c_f(u, v)>0\) for all edges \((u, v)\in p\) :
- Find \(c_f(p)=\min[c_f(u, v): (u, v)\in p]\)
- Accumulate: \(maxflow \leftarrow maxflow + c_f(p)\) .
- Update residual graph \(G_f\) . For each edge \((u, v)\in p\) :
- \(G_f(u, v)\leftarrow G_f(u, v)-c_f(p)\) (Send flow along the path)
- \(G_f(v, u) \leftarrow G_f(v, u) + c_f(p)\) (The flow might be “returned” later)
- Get edges of the min-cut (if need):
- Run BFS(breadth first search) from \(s\) in \(G_f\)
- Traversed points construct \(O\) and non-traversed points construct \(B\) .
- Return \(maxflow\) and \(O\) and \(B\) (min-cut is the edges between \(O\) and \(B\) in \(G_f\) ).
B. Maxflow for Energy Minimization
Title: An Experimental Comparison of Min-Cut/Max-Flow Algorithms for Energy Minimization in Vision
Author: Yuri Boykov, Vladimir Kolmogorov
改进算法: 维护两个不重叠的搜索树 \(S\) 和 \(T\), 它们的根分别是源 \(s\) 和汇 \(t\), 同时满足 \(S\) 树的父节点到子节点的边流量不满(nonsaturated), \(T\) 树的子节点到父节点流量不满. 不在树中的其他节点为”自由节点”. 树节点分为激活的(active)和抑制的(passive, 暂且叫成抑制的吧). 激活的节点可以继续扩展新的子节点(从相邻的自由节点中选择, 2D 为8相邻, 3D为26相邻), 抑制的节点没有相邻的自由节点可扩展.
如图所示:
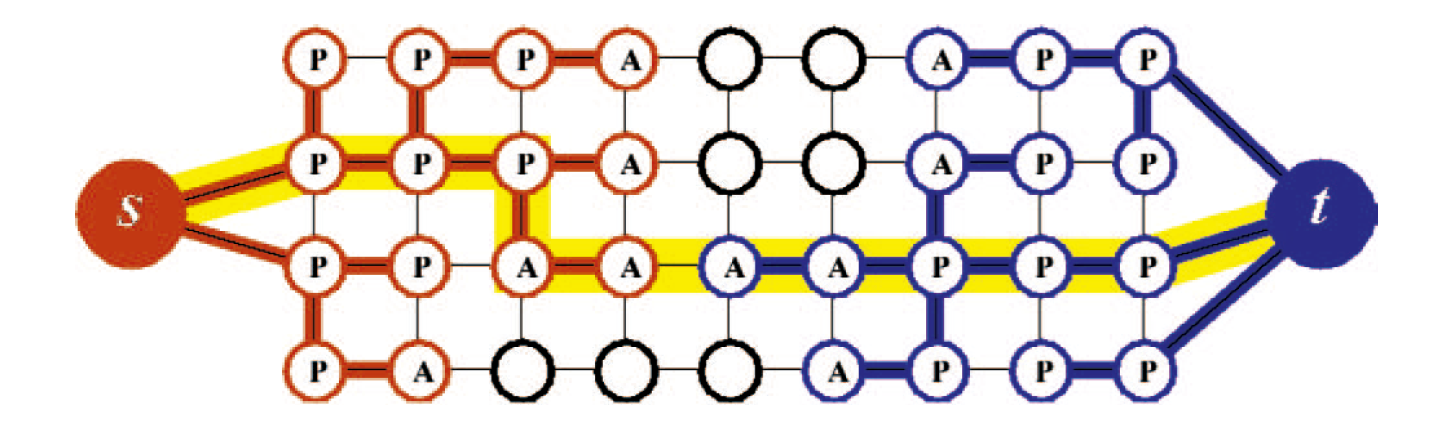
Example of the search tree S(read nodes) and T(blue nodes) at the end of the growth stage when a path(yellow line) from the source s to the sink t is found. Active and passive nodes are labeled by letters A and P, correspondingly. Free nodes appear in black.
算法流程:
- “增长(growth)”阶段: 搜索树 \(S\) 和 \(T\) 增长, 直到两棵树”接触”到从而产生一条 \(s\rightarrow t\) 路径.
- 为了简便, 记树从根到叶方向的边为正向边, 从叶到根方向的边为反向边
- “增广(augmentation)”阶段: 增广上一步找到的路径, 搜索树均变为森林.
- 寻找”瓶颈”容量 \(\Delta\)
- 增广: (1) 更新残差图(residual graph): \(S\) 树的正向边(根->叶)容量减少 \(\Delta\), 反向边(叶->根)容量增加 \(\Delta\); \(T\) 树做相反的增减(对于流图来说是做了相同方向的增减). (2) 打断流图满容量的正向边, 并把该边的头节点加入孤儿(orphan)列表.
- 注意: \(S\) 树的正向边是流图“从源到汇”的正向边, \(T\) 树的反向边是流图“从源到汇”的正向边.
- “应用(adoption)”阶段: restore树 \(S\) 和 \(T\) .
- 依次处理孤儿列表中的节点 \(p\)
- 为 \(p\) 寻找一个新的父节点 \(q\) , 父节点要满足三个条件: (1)边 \((p, q)\) 容量不满, (2)父子来自于同一棵树(孤儿则考虑其原来的父亲来自于哪棵树), (3)父节点的”origin”为 \(s\) 或 \(t\) .
- 如果找到了多个可行的父节点, 则选择离 \(p\) 最近的那个
- 如果找到了新的父节点 \(q\), 则把 \(q\) 设为 \(p\) 新的父节点; 如果没找到, 则把 \(p\) 恢复为自由节点, 并做以下操作
- 扫描 \(p\) 的所有同一棵树上的邻居 \(q\), 如果边 \((q, p)\) 容量不满, 则把 \(q\) 设为激活节点; 如果 \(q\) 的父节点是 \(p\), 则把 \(q\) 添加到孤儿列表.
- 把 \(p\) 从激活节点列表中移除.
- 依次处理孤儿列表中的节点 \(p\)
- 以上三步循环直到没有新的激活节点.
技术报告和实现源码(第三方): Code
示例图片:
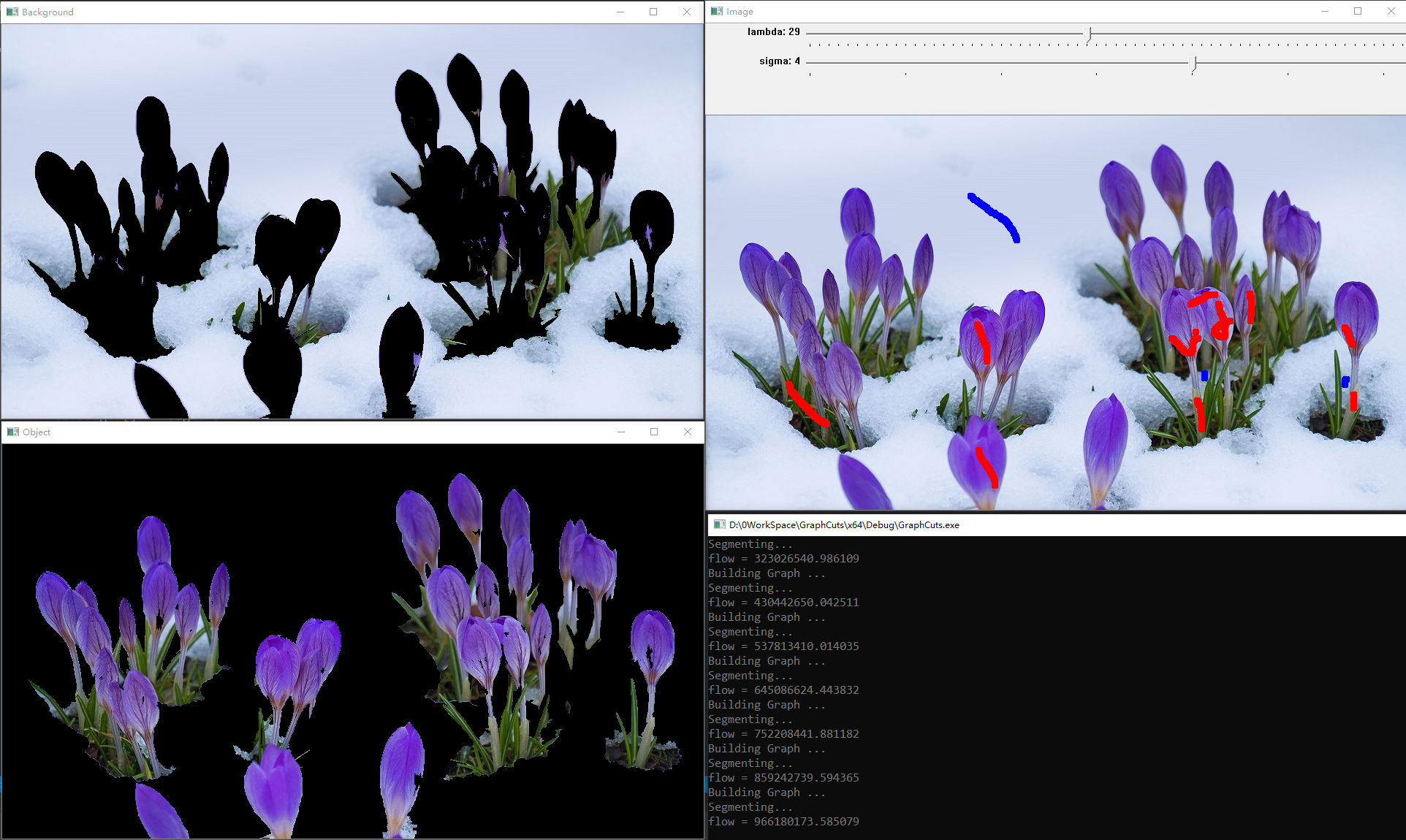
Graph-Cuts 示例
C. GrabCut
Title: “GrabCut” – Interactive Foreground Extraction using Iterated Graph Cuts
Author: Carsten Rother, Vladimir Kolmogorov, Andrew Blake
GrabCut 是 OpenCV 中标准的交互式图割算法.
本文基于文献[1], 为了简化交互负担, 允许用户开始只需要用矩形框框出目标物体即可. 在某些图像上可以达到和用户使用画笔涂抹一样甚至更好的效果. 此外, GrabCut 还允许用户在对风格结果不满意时进一步使用 Graph Cuts 的交互方式补全. 同时 GrabCut 支持彩色图像的分割. GrabCut 的分割例子如图所示.

GrabCut 示例
文献[1]中的能量函数中region项使用用户涂抹区域的密度分布的对数建模, 而本文 GrabCut 则使用两个有 \(K\) 个成分的高斯混合模型(Gaussian Mixture Model, GMM)分别对前景和背景进行建模. 为了方便优化, 增加一个向量 \(\mathbf{k}=(k_1, \cdots, k_n, \cdots, k_N)\), 其中 \(k_n\in[1, \dots, K]\) 是赋予每一个像素的一个 GMM 成分. 从而能量函数 \(E(A)\) 中的 region 项 \(R(A)\) 变为
\[R(\alpha, \mathbf{k}, \theta, \mathbf{z}) = \sum_n D(\alpha_n, k_n, \theta, z_n),\]其中 \(D\) 表示 GMM 分布函数的对数, 此处不再展开. \(\alpha\) 表示不透明度 (取值于0和1), 决定了一个像素属于前景还是背景.
算法流程:
- 初始化
- 用户绘制的矩形框 \(T_B\), 前景集合设为 \(T_F=\emptyset\), 背景集合 \(T_U=\overline{T_B}\). 对于 \(n\in T_B\), 初始化 \(\alpha_n=0\), 其他为 \(1\).
- 前景和背景的 GMMs 分别根据 \(\alpha_n\) 取值初始化.
- 迭代优化
- Assign GMM components to pixels: for each \(n\) in \(T_U\),
- Learn GMM parameters from data \(\mathbf{z}\):
- Estimate segmentation: use min cut to solve:
- Repeat from step 1, until convergence.
- Apply border matting.
(未完待续…)
6. References
-
Interactive Graph Cuts for Optimal Boundary & Region Segmentation of Object in N-D Images
Yuri Y. Boykov, Marie-Pierre Jolly.
[link]. In ICCV, 2001. -
An Experimental Comparison of Min-Cut/Max-Flow Algorithms for Energy Minimization in Vision
Yuri Boykov, Vladimir Kolmogorov.
[link]. In TPAMI 2004. -
“GrabCut” – Interactive Foreground Extraction using Iterated Graph Cuts
Carsten Rother, Vladimir Kolmogorov, Andrew Blake
[link]. ACM TOG, 2004